
About me
Since November 2021, I am a post-doc in ISTA's (Institute of Sciences and Technology Austria) Visual Computing group under the supervision of Chris Wojtan (funded by the ERC project CoDiNA).
Before that, I received in 2017 my engineering degree in computer science and applied maths from Grenoble INP - Ensimag with highest honors. Then, I prepared and obtained my PhD in 2021 at Inria Grenoble-Rhône Alpes / LJK in the Elan team under the supervision of Florence Bertails-Descoubes and Mélina Skouras (funded by the ERC project GEM).
Publications
Below are some selected publications. The full list can be found here.
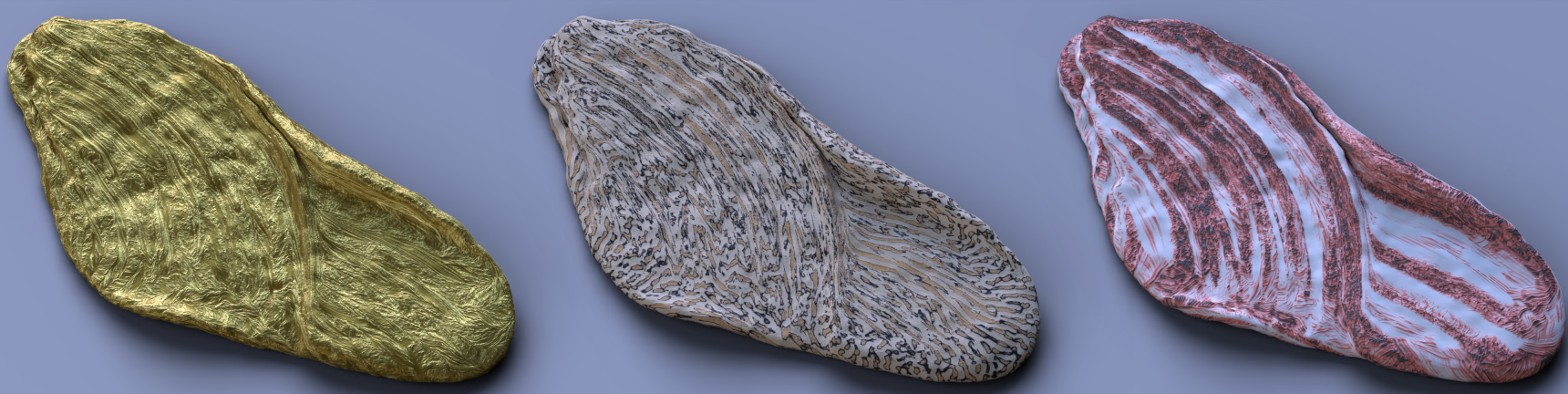
Physics-inspired procedural texturing of extremely deformable surfaces
(website,
paper,
supplemental,
video,
extra video,
code)
Aleksei Kalinov, Mickaël Ly, Christian Hafner, Chris Wojtan
ACM Transactions on Graphics (Siggraph NA 2026)
Abstract ⤵
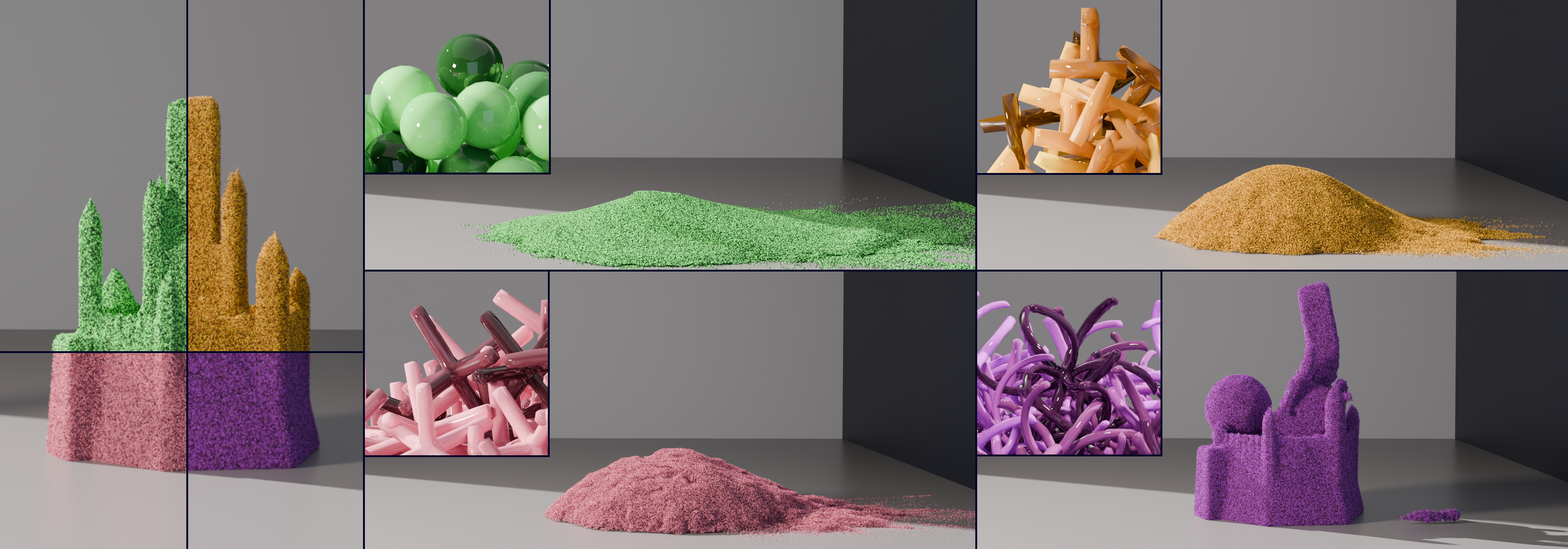
Numerical Homogenization of Sand from Grain-level Simulations
(website,
paper,
supplemental,
video,
extra video,
code (homogenisation),
code (MPM simulation))
Yi-Lu Chen, Mickaël Ly, Chris Wojtan
ACM Transactions on Graphics (Siggraph Asia 2025)
Abstract ⤵
Liquid Crystal Elastomer Kirigami
(Abstract)
Irina Malina Strugaru, Quentin Martinet, Mickaël Ly, Bernd Bickel, and Jérémie Palacci
European Solid Mechanics Conference (Accepted Talk)
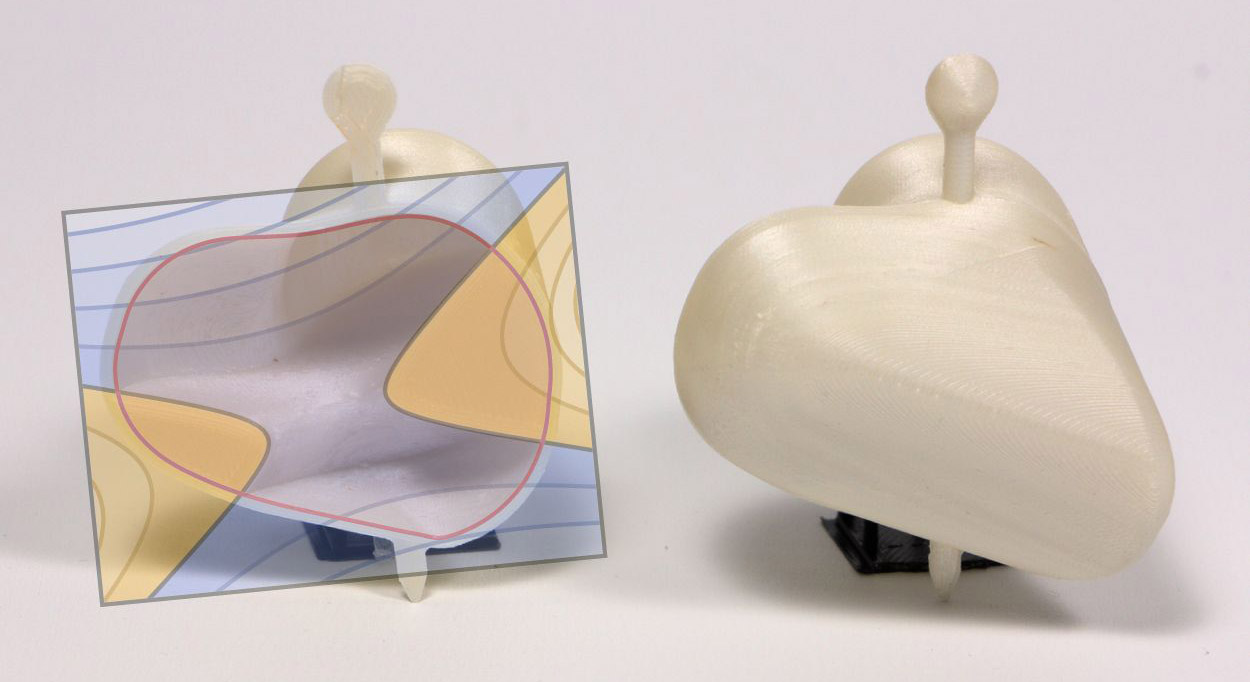
Spin-It Faster: Quadrics Solve All Topology Optimization Problems That Depend Only On Mass Moments
(website,
paper,
supplemental,
video)
Christian Hafner, Mickaël Ly, Chris Wojtan
ACM Transactions on Graphics (Siggraph 2024)
Honorable Mention from the Siggraph 2024 Technical Papers Awards
Abstract ⤵
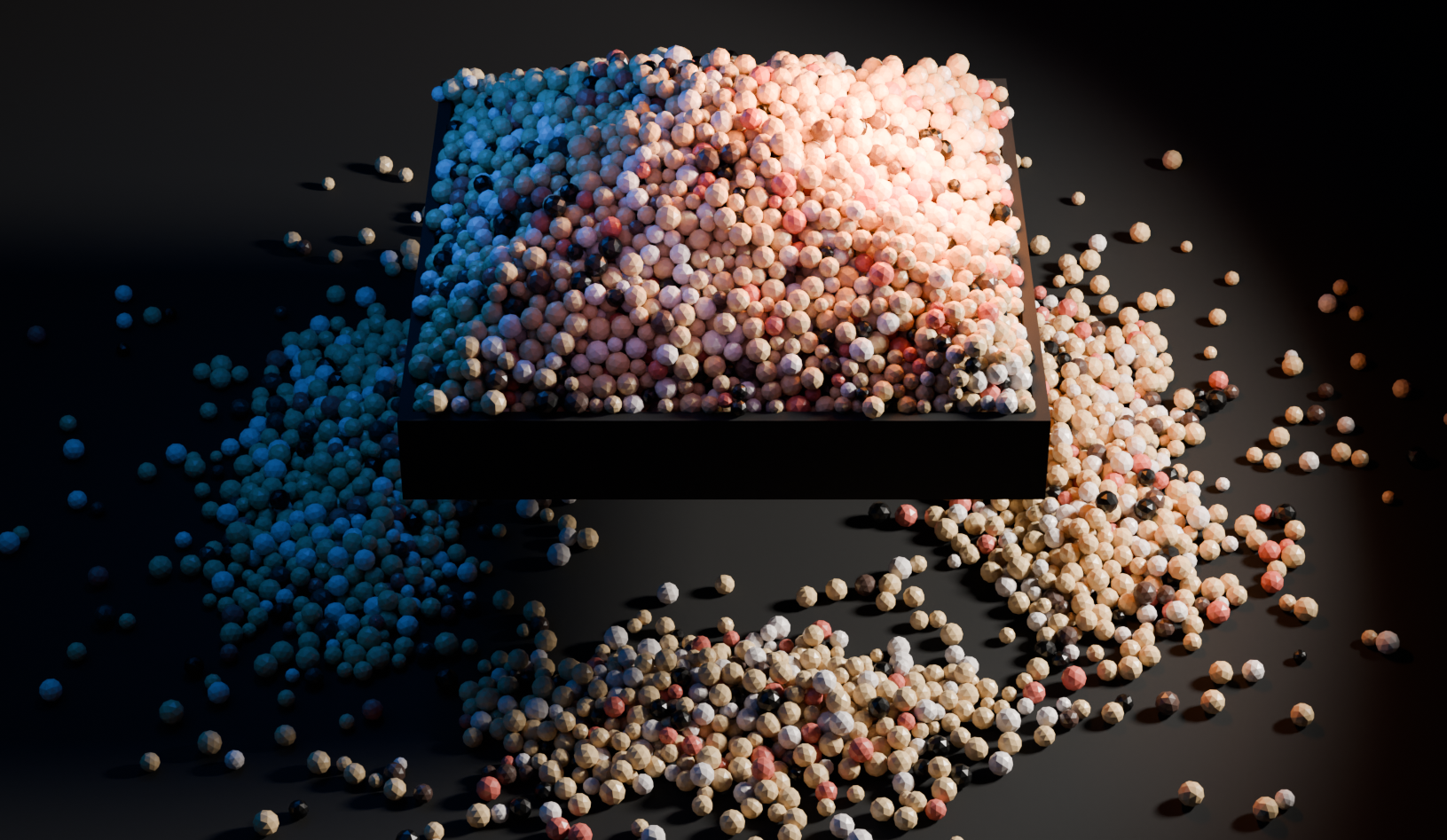
Primal–Dual Non-Smooth Friction for Rigid Body Animation
(website,
paper,
supplemental,
video,
additional video,
code)
Yi-Lu Chen, Mickaël Ly, Chris Wojtan
ACM Siggraph 2024 Conference Papers
Abstract ⤵
Unified treatment of contact, friction and shock-propagation in rigid body animation
(website)
Yi-Lu Chen, Mickaël Ly, Chris Wojtan
Poster at Symposium on Computer Animation 23 (SCA)
Abstract ⤵

Static inverse modelling of clothes
(website,
manuscript)
Mickaël Ly -
PhD Thesis, 2021
Honorable mention for the AFIG (Eurographics French Chapter) PhD Award 2022
About some of the inversion examples ⤵
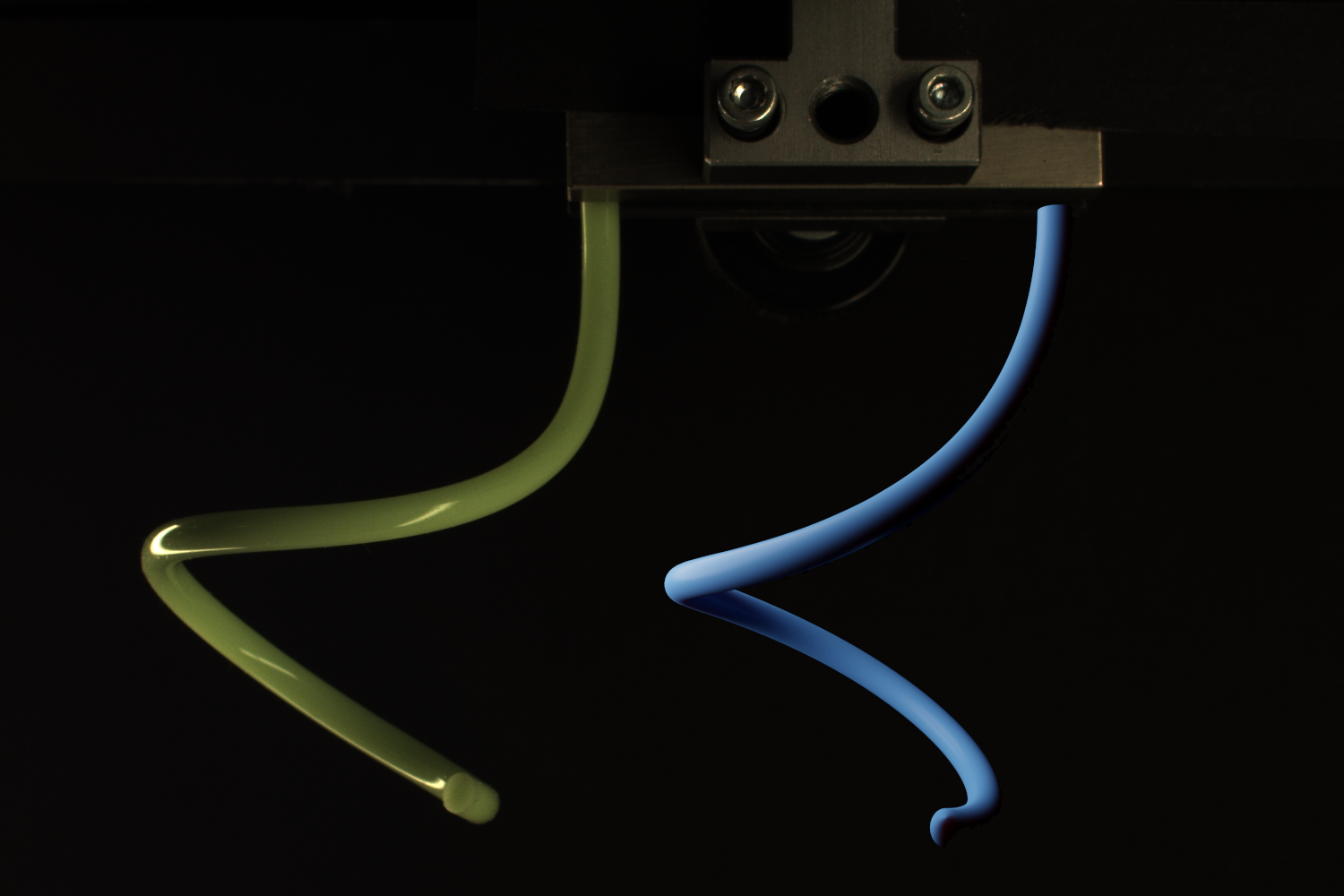
Physical validation of simulators in Computer Graphics: A new framework dedicated to slender elastic structures and frictional contact
(website,
paper,
accompanying video,
supplemental ,
recipe manual for the tests )
Victor Romero, Mickaël Ly, Abdullah-Haroon Rasheed, Raphaël Charrondière, Arnaud Lazarus, Sébastien Neukirch, Florence Bertails-Descoubes
ACM Transactions on Graphics 2021 (SIGGRAPH)
Abstract ⤵

Projective Dynamics with Dry Frictional Contact
(website,
paper,
accompanying video,
code )
Mickaël Ly, Jean Jouve, Laurence Boissieux, Florence Bertails-Descoubes
ACM Transactions on Graphics 2020 (SIGGRAPH)
Abstract ⤵
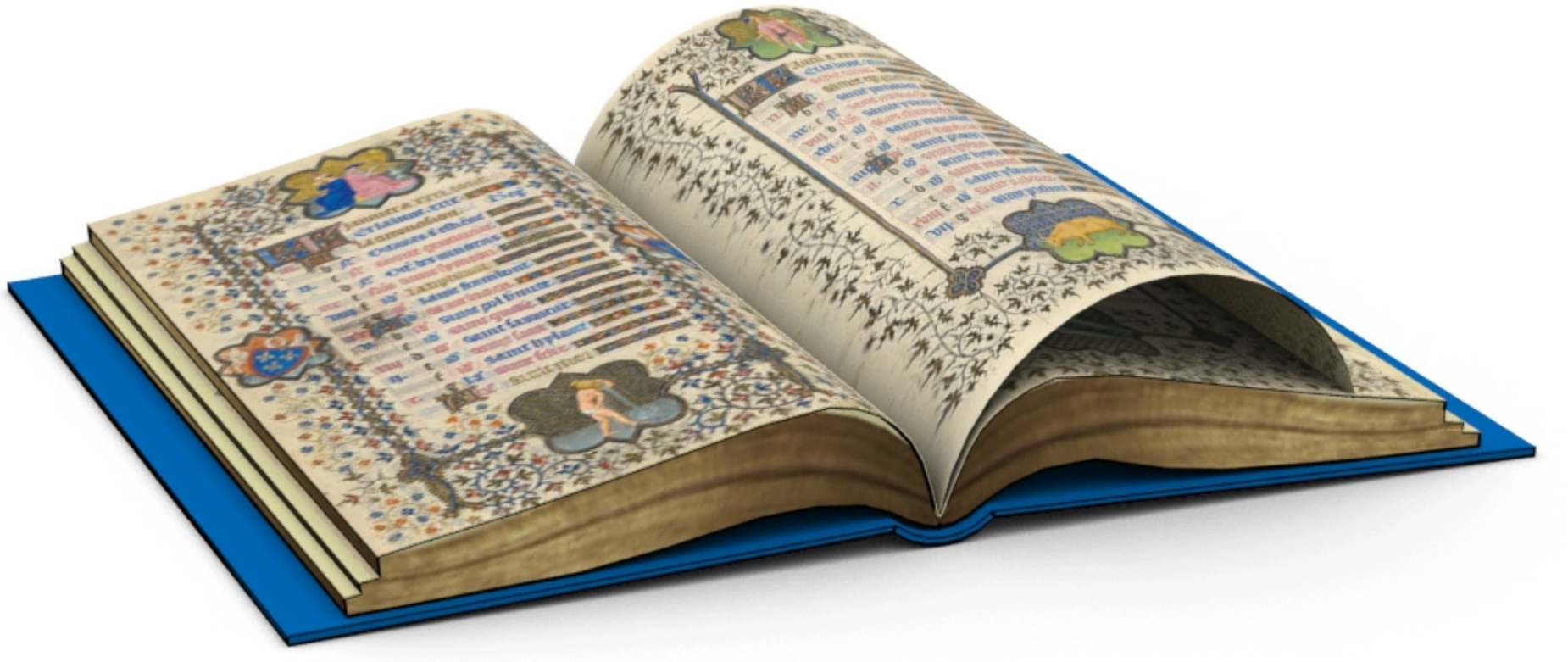
Inverse Elastic Shell Design with Contact and Friction
(website,
paper,
accompanying video,
press release)
Mickaël Ly, Romain Casati, Florence Bertails-Descoubes, Mélina Skouras, Laurence Boissieux
ACM Transactions on Graphics 2018 (SIGGRAPH Asia)
Abstract ⤵
About some of the inversion examples ⤵
Conferences, workshops and journals
Organising Committee member: Graphyz (2026)
Program Committee member: Symposium on Computer Animation (2024-2026), JFIG (2025; Best Paper Committee), Eurographics (2025; Short Paper Program)
Reviewer: Symposium on Geometry Processing (2026), Siggraph North America (2020-2021, 2023-2026), Transaction on Graphics(2023, 2024, 2026), Siggraph Asia (2021-2022, 2024-2026), Transactions on Visualization and Computer Graphics (2023-2024), Eurographics (2019, 2022-2023, 2025), Journal of Computer-Aided Design (2022)
Author: Siggraph Asia (2018, 2025), European Solid Mechanics Conference (2025; Short talk), Siggraph North America (2020, 2021, 2024, 2026), Symposium on Computer Animation (2023).
Attendee: Curves and Surfaces (2026), Siggraph North America (2018, 2020-2021, 2022-2025), ESMC (2025), JFIG (2022), Siggraph Asia (2018)
Teaching
-
2019/2020 & 2020/2021 - First semester
From Lagrangian mechanics to simulation tools for computer graphics
with Florence Bertails-Descoubes and Mélina Skouras at ENS Lyon.